HOW TOs
How to change the IP address
# ifconfig eth0 x.x.x.xWhere x.x.x.x is the new IP address.
Note: In this way the new address will remain changed up to the new reboot of the board. To change it permanently you need to modify the file /etc/conf.d/net.eth0. In the last 4 rows of this file are specified the network parameters used at startup:
IP="192.168.0.90" NETMASK="255.255.255.0" BROADCAST="192.168.0.255" GATEWAY="192.168.0.1"
Once changed the IP address the board could became unreachable since the ARP cache inside the PC used for accessing the board has stored the old address of the FOX board. To avoid it just type the arp -d from a prompt window on your PC.
How to change the MAC address
00:40:8C:xx:xx:xxWhere:
- xx:xx:xx is a changeble part configured by Acme Systems during the board factory testing and
- 00:40:8C is a fixed part configured by Axis during the CPU factory testing.
bootblocktool -a SERNO 00408CxxxxxxWhere "xxxxxx" is the new hexadecimal number you have selected in the range of 000000 to FFFFFF. For example:
bootblocktool -a SERNO 00408C000001After a complete reflashing with -F option the default MAC address is 00408CCD0000. In this case the red led DL1 flash to indicate that you have to change this address.
Once changed the MAC address the board could became unreachable since the ARP cache inside the PC used for accessing the board has stored the old address of the FOX board. To avoid it just type the arp -d from a prompt window on your PC.
How to set the DNS Server
# nameserver x.x.x.xAnyway this file will be overwritten at startup with the contents of the file /etc/resolv.conf.def so you have to add the same line also to this file otherwise you will lost the DNS Server IP at the first restart.
How to revert to the factory default settings
Switch then the Fox off again and then on without pressing the switch. You will be reverted to the original condition of the read/write filesystem.
You will loose all your modifications done on the files in the read/write directory /etc that will be reverted to the factory default. To revert deeper modifications you will have to reflash the Fox board with the SDK environment.
This procedure doesn't work if you got stuck during the flashing process and damage the kernel read only partition flash contents. In this case you have to use the LAN flashing procedure to recover the board: @h4='703'
How to turn off the flashing red led DL1
bootblocktool -a SERNO 00408CxxxxxxWhere "xxxxxx" is the new hexadecimal number you have selected in the range of 000000 to FFFFFF. For example:
bootblocktool -a SERNO 00408C000001After a reboot the red led DL1 will not blink anymore.
To see the new MAC address type:
# ifconfig eth0
eth0 Link encap:Ethernet HWaddr 00:40:8C:00:00:01
inet addr:192.168.0.90 Bcast:192.168.0.255 Mask:255.255.255.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:47 errors:0 dropped:0 overruns:0 frame:0
TX packets:36 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:2837 (2.7 KiB) TX bytes:2069 (2.0 KiB)
Interrupt:17 DMA chan:1
Once changed the IP address the board could became unreachable since the ARP cache inside the PC used for accessing the board has stored the old address of the FOX board. To avoid it just type the arp -d from a prompt window on your PC.
How to read the system messages
/var/log/messagesTo see its content type:
# cat /var/log/messagesor
# dmesg /var/log/messagesTo see it continuously while you are using the system, open a new telnet session and type:
# tail -f /var/log/messages
How to restart the Web server
To do this type:
# /etc/init.d/httpd restartAlternatively it's possible to stop and then start again the web server with the following commands:
# /etc/init.d/httpd stop # /etc/init.d/httpd startWEB access
How to set the system date
To manually change the system date use this command:
# date MMDDHHMMYYYY
where MM is the month (01-12), DD is the day (01-31), HH is the hour (00-23), MM is the minute (00-59), YYYY is the year (i.e. 2005). By example to set 11:26 of December 13th 2005 type:
# date 121311262005 Tue Dec 13 11:26:00 UTC 2005System date is usually based on periodic hardware interrupts. The kernel maintains the current time and advances it at every interrupt. The alarm clock functionality, however, relies on the interrupts and cannot provide a higher accuracy than the interrupt frequency, which is 10ms. (Clock Granularity).
How to set the Real Time Clock date
... ds1302: RTC found. ds1302: SDA, SCL, RST on PB0, PB1, GENIO2 rtc_time : 16:51:18 rtc_date : 2007-07-15 ...To change the date inside the RTC chip set the system date then type:
# hwclock -wTo read the RTC date type:
# hwclock -r
How to activate the DHCP client
In particular you have to change the line:
BOOTPROTO="none"in:
BOOTPROTO="dhcp"Once acquired the dynamic IP from the DHCP server it is possible to verify on the DHCP server web page which is the IP address obtained from the FOX board. Check the SW releases
To view the version of the Linux Kernel on your FOX Board type:
# uname -a Linux axis 2.4.31 #9 Wed Jan 18 10:03:57 CET 2006 cris unknownTo know more about the uname options type:
# uname --help BusyBox v1.00 (2005.11.04-15:07+0000) multi-call binary Usage: uname [OPTION]...Print certain system information. With no OPTION, same as -s.
Options:
-a print all information
-m the machine (hardware) type
-n print the machine's network node hostname
-r print the operating system release
-s print the operating system name
-p print the host processor type
-v print the operating system version
The command cat/etc/release instead shows the release number of the SDK used to generate your FOX Board firmware:
# cat /etc/release JFFSID="2.01"
How to start a program at FOX boot time
How to compile against uClibc with the SDK 2.01
To change the Standard C library in your SDK environment follow these steps: On a session in your devboard-R2_01 directory do:
make menuconfigand in the "General configuration" menu change the "Standard C library" option to uClibc then exit saving the changed option and do:
./configureto add the necessary packages needed and then:
maketo rebuild the kernel and to make an fimage containing the uClibc library.
Only then you can go on your apps/yourdir and do:
make cris-axis-linux-gnuuclibcto enable the environment to cross compile correctly against the uClibc library, and then:
maketo effectively compile the application.
Otherwise in the environment there is no reference on the requested uclibc library.
So when you have both environments (for glibc and uClibc) installed you can cross compile correctly.
Remember to compile for the Standard C library installed in your Fox (check your /lib directory inside the Fox to see the installed library) otherwise a message of:
file not foundwill be displayed with no other clues around the wrong library linked.
How to disable the console port messages to enable the use of J10 as normal serial port /dev/ttyS0
Open the kernel options with the command:
[..../devboard-R2_01]$ make kernelconfigin the "Hardware setup" submenu, look for "Product debug-port" and set it to "disabled".
Enter in the directory packages/param/syslog/development-R1_1_0/ and edit the file syslog.conf so that the first line is like this:
*.debug;kern.none /dev/null
Only for kernel 2.6
From the os/linux-2.6/arch/cris/arch-v10/boot/compressed/ directory do a:
[....boot/compressed]$ rm misc.o
Only for kernel 2.4
From the /os/linux/arch/cris/boot/compressed/ directory do a:
[....boot/compressed]$ rm misc.o
Now for any kernel version recompile the fimage with the command:
[..../devboard-R2_01]$ makeAll boot and kernel messages are now gone. You can use the J10 serial port ttyS0 as a normal serial port without problems.
How to enable the Real Time Clock support
# source init_env ... # make kernelconfigSelect the item:
Driver for built.in interfaces --->Then if you have a FOXGM or a FOXZB (or if you have wired the RTC chip as explained on Add a Dallas DS1302 I2C Real Time Clock) configure the RTC section parms like on this screenshot:
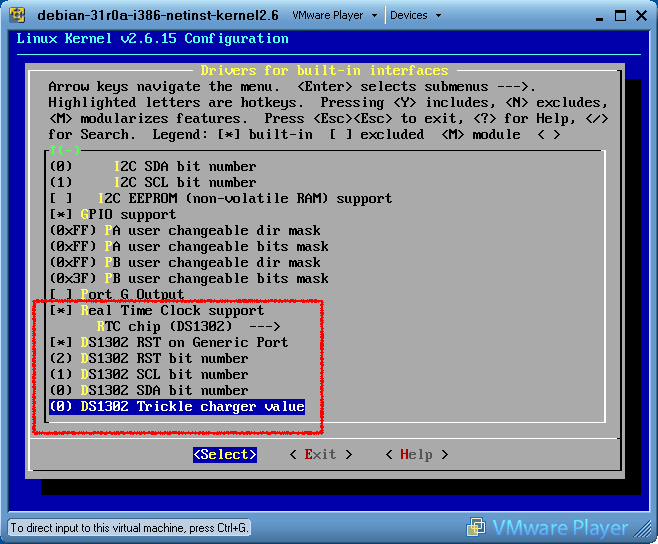
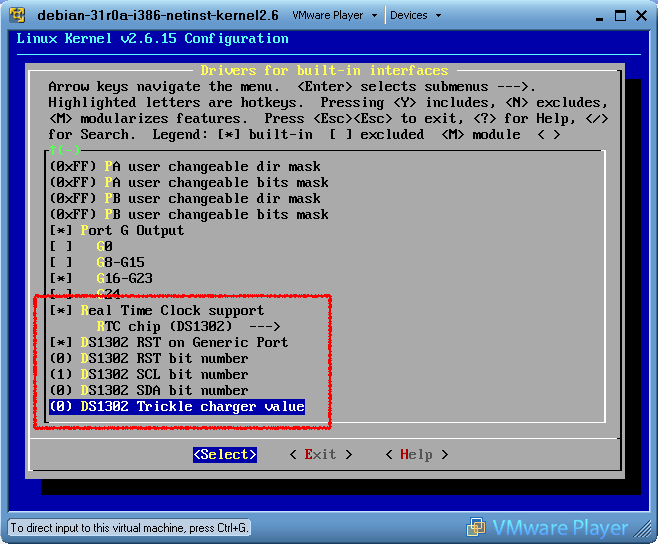
Exit and save the configuration then type:
# make ...to generate a new image to flash on the FOX Board (see How to reflash a FOX Board>
How to enable the MMC support
# source init_env ... # make menuconfigSelect the item:
Driver settings --->The configure the RTC section parms like on this screenshot:
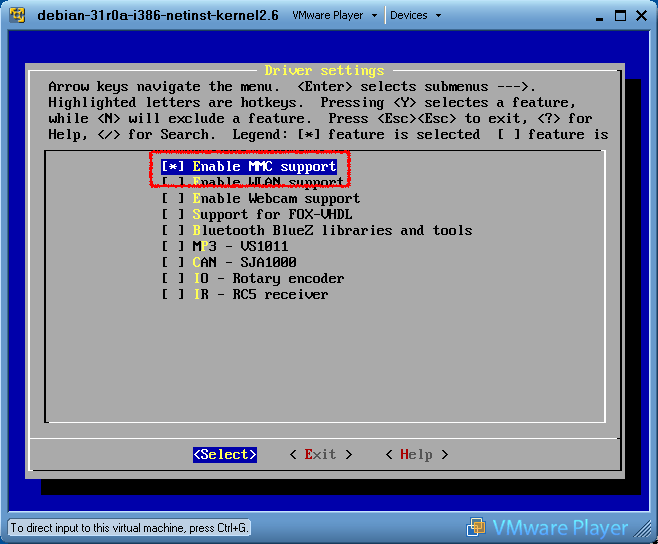
Exit and save the configuration then type:
# ./configure ... # make ...to generate a new image to flash on the FOX Board (see How to reflash a FOX Board>
Troubleshootings
This section covers some of the issues that can occur with your FOX Board, and provides all the troubleshooting steps you need to resolve them by yourself
FOX Board leaflet errata corrige
There are some errors on the leaflet recently released with the FOX Board. The errors concern the four jumpers near the white J2 power connector and the defaulf IP address.
Read more...
The Telit modem doesn't turn on on FOXGM
When you are using the FOXGM board, with some factory default images it is impossible to turn on the Telit Modem setting the PB7 line when PB7 line is defined as input by default at startup. The same is for the PB6 line that is used to reset the modem.There are two solutions:
- Set PB6 and PB7 as output by a C program. This program will work on a factory default image. The code to use is:
#include "linux/gpio_syscalls.h" int main(void) { gpiosetdir(PORTB,DIROUT,PB6); gpiosetdir(PORTB,DIROUT,PB7); gpioclearbits(PORTB,PB6); gpioclearbits(PORTB,PB7); return 0; }You can compile it by Webcompiler.
- Change the setting for PB6 and PB7 on the SDK.
- Go to the SDK root directory.
- Type make kernelconfig
- Select Hardware Setup
- Go to R_PORT_PB_CONFIG and set it, if necessary, to 0x00
- Go to R_PORT_PB_DIR and set it, if necessary, to 0xce (bit=0 means input; bit=1 means output initial direction at boot)
- Go to R_PORT_PB_DATA and set it, if necessary, to 0x03 (bit=1 means high initial state for the bit)
- Select Driver for built-in interfaces
- Go to PB user changeable dir mask and set it, if necessary, to 0xFF (bit=1 means user changeable direction of the pin)
- Go to PB user changeable bit mask and set it, if necessary, to 0xFF (bit=1 means user changeable logic state of of the pin)
- Save and exit.
- Generate the new image with make
- Flash the new image on the FOX Board (see How to reflash a FOX Board)
Make message: Makefile:23: *** missing separator. Stop.
If you get this message during the building of the SDK you should check if your Linux distribution /bin/sh is linked to dash instead of bash as in Ubuntu. You should change to bash and the problem should disappear.
Image this far exceeds alignment offset - it is too large!
The fimage you have generated is too large. See on How to reflash a FOX Board how to change the flash memory partition.
When compiling an image with the old Axis SDK 2.01, the new FOX Board LX doesn't work
Change the timing configuration word for the SDRAM chip named CONFIG_ETRAX_DEF_R_SDRAM_TIMING inside the file kernelconfig or kernelconfig-2.6.
- For the red FOX "classic" the value is CONFIG_ETRAX_DEF_R_SDRAM_TIMING=0x80608002
- For the new FOX Board LX the value is CONFIG_ETRAX_DEF_R_SDRAM_TIMING=0x80008002
During SDK installation the make process stops and shows "make[4]: yacc: Command not found"
You have to install Bison.
On the Linux distributions derivated from Debian type:# apt-get install bison
During SDK installation the make process not found the idea.h and engine.h files
Create this link:cd devboard-R2_01/apps/crypto/openssl/openssl/include/openssl/ ln -s ../../crypto/idea/idea.h ln -s ../../crypto/engine/engine.h
After Webcompiler has compiled a source (i.e. hello.c) I obtain this error: "/bin/sh: ./hello.out: not found"
This problem happen when you link your code to glibc library instead of uClibc or viceversa.
Real Time Clock doesn't work
Missing microwindows-0.91 for NANOX
If you are unable to install the microwindows directory under apps download this file: microwindows-0.91.tar.gz inside devboard-R2_01/apps and decompress it with the command:
tar xvfz microwindows-0.91.tar.gz
Frequently Asked Questions
This page contains answers to commonly-asked questions about the FOX Board and other Acme Systems products
What is the acceptable range of voltage on the 5.00 volt input on J2 or J14 ?
The maximum input voltage specification for the Fox should be under +5.5 Volt. Infact, even if the processor has its regulator onboard that is able to accept up to 8 Volts and deliver the +3.3 Volt regulated there is another component: LM3526 that has a limitation on its maximum voltage input at +5.5 Volts. On the matter of regulation: it affects primarily the behaviour of the USB devices connected to the board since the power supply of +5Volt is passed to them. If it is poorly regulated it could compromise the correct working of the peripherals. We found some USB sticks that require a very well regulated 5.00 volts for working. Some times even 4.75 is too low. The board alone for running Linux withour USB peripherals connected can accept 4.75 Volts.
Is it possible to power a FOX board with the 5V power coming from a PC USB ?
Yes, you can safely attach the +5V coming from a USB from a PC. Those ports are able to deliver up to 500mA on the +5V. It is not possible to connect the power supply of +5V at the Fox USB port. You have to connect the +5V to the proper pin of J2 or J6 or J7. Of course I am speaking for the board alone. Since the Fox needs approx. 280 mA from the +5V no much current is left for any dongle USB to be connected at the Fox USB ports.
Video how tos
How to mount the FOX Board inside the FOX Case
This video shows how to mount the FOX Board inside a FOX Case
Insert Lego (c) blocks on the FOX Case
This video shows the Lego's blocks placements available on the FOX Board.
How to mount the FOX Board inside the TUX Case
TUX Case is a TUX-shaped plastic enclosure that is designed to house the Acme Systems tiny Embedded Linux FOX Board LX and runs a fully Linux OS inside its belly. This video shows how to mount the FOX Board a TUX Case.